

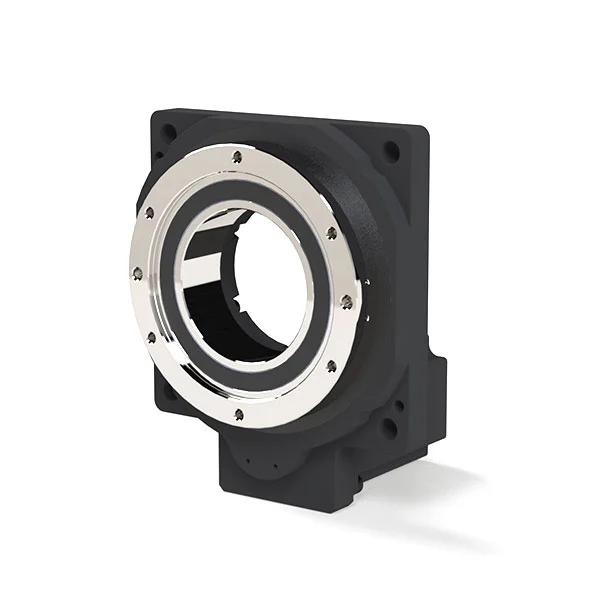

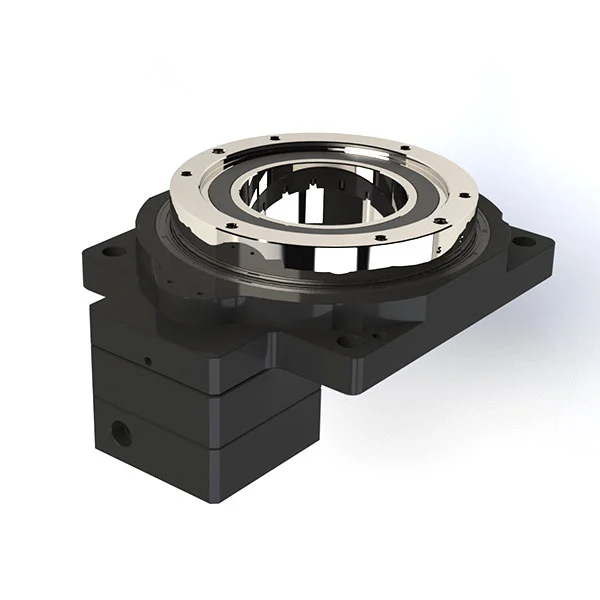



Hollow Rotary Platform bruger en højpræcisionsgearstruktur og radiale lejer til at forbedre drejningsmomentet og stivhed, hvilket muliggør mere stabilt belastningsbeleje. Når den er parret med en servomotor eller en steppermotor, kan den udføre vilkårlig vinkelafdeling. Det opfylder ikke kun den cifferkontrol, der ikke kan opnås af indeksere, men også har en positioneringsnøjagtighed, der kan sammenlignes med den af direkte drevmotorer, og kan opnå placering af inertielle belastninger inden for en kort periode.
Installationsinstruktioner til hul Rotary Platform
 Først skal du bekræfte, om motoren matcher platformen, og fjern fremmede stoffer på overfladen. |
② Fjern flad ende skruerne på overgangsflangen, og drej indgangsenden for at justere placeringen, indtil fastgørelsesboltene i låsningsringen kan ses. |
③ Juster motorakslen med reduktionsindgangsafslutningen, indsæt den i reduceren, og spænd de forbindende bolte diagonalt. |
 Spænd låserringen og spænd boltene; Se nedenstående tabel for drejningsmoment. |
⑤ Brug en momentnøgle til at stramme fastgørelsesskruerne diagonalt. Se momenttabellen nedenfor for drejningsmomentet. |
⑥ Spænd den flade ende skrue. |
Installation af skaftets ærme

Udvælgelsespunkter af hul roterende platform
Beregning af belastning/inerti af det objekt, der skal transporteres (JW)
Inertien af det objekt, der skal transporteres, skal være mindre end 30 gange den transmissionsenhed som en standard.
Outputenden
■ Beregning af accelererende drejningsmoment (TA)
Se følgende formel:
Accelererende drejningsmoment t [n · m] = (jm + jw) * π/30 * (n₂ - n₁)/t₁)
hvor JM: inerti af motoren [kg · m²]; JA: Inerti af mekanismen [kg · m²]; JW: Inerti af belastningen [kg · m²]; N₂: driftshastighed [R/min]; N₁: starthastighed [R/min]; T₁: Acceleration (deceleration) tid [s].
■ Beregning af det krævede drejningsmoment
Det krævede drejningsmoment beregnes ved at multiplicere summen af belastningsmomentet forårsaget af friktionsimpedans og det accelererende drejningsmoment forårsaget af inerti af en sikkerhedsfaktor.
Påkrævet drejningsmoment T = (belastningsmoment [N · M] + accelererende drejningsmoment [N · M]) × Sikkerhedsfaktor = (TL + TA) × S. Sikkerhedsfaktoren er større end 1,5.
■ Valg af motor
Motorens krævede drejningsmoment skal være inden for specifikationsområdet for hastighedsmoment.
Speed-drejningsmomentkarakteristikkurve for trinmotoren.
Adresse
Nr. 148 Dongfeng Village, Xiaoshan-distriktet, Hangzhou City, Zhejiang-provinsen, Kina
Tlf














